Brief Course Description
This course explores topics in deep learning with applications to robotic grasping. During the first portion of the course, students will learn how to implement several learning algorithms using PyTorch and understand basic concepts in robotic manipulation. The rest of the course will be project-based, with students working in groups to develop a learning algorithm to perform an interesting manipulation task with a low-cost robotic arm. syllabus
Robot
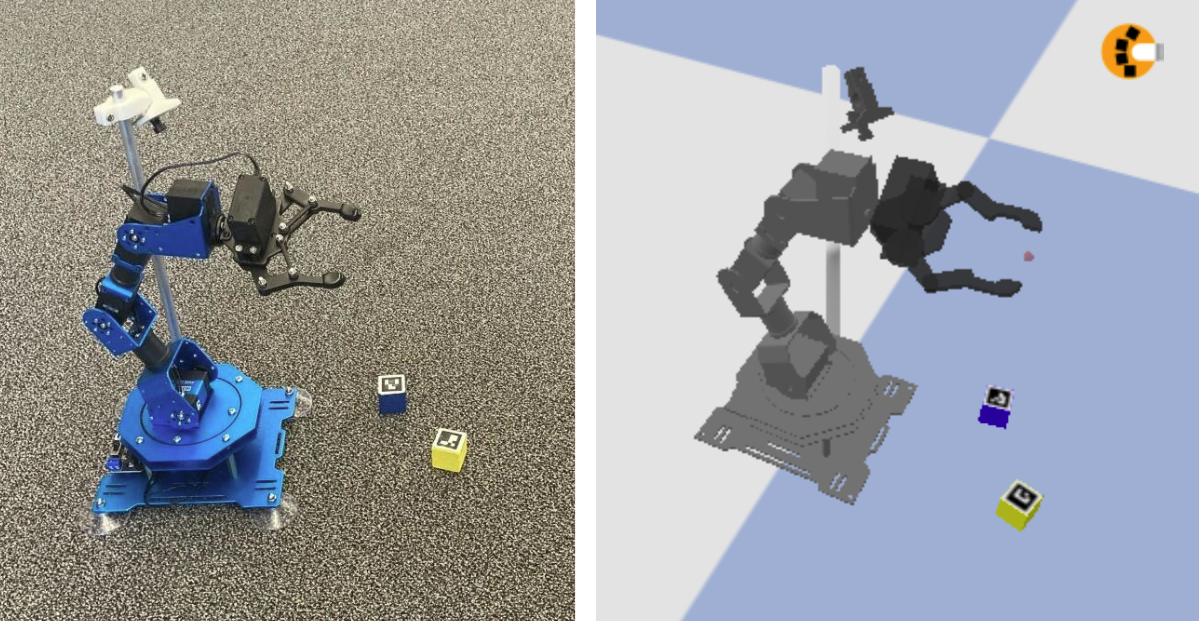
All students will have access to a Hiwonder XArm Robot. Despite its low cost, it is quite capable. During class, we will work with a virtual version of the robot in a simulator. For your final project, you will develop a learning algorithm that works on the real robot.
Computer Requirements
You will need access to a laptop that can run Python >3.6, so you can follow along in class. To send commands to the robot, you will need a USB-A port (they can be rented from ITS for 24 hours at a time).
Grading
Your final grade will be composed of:
- Programming Assignments (20% of your grade)
- Participation in project discussions (30% of your grade)
- Final Project (50% of your grade)
Late Policy
Late assignments will be penalized by 20% for each day late. You will have 3 late days that you can use on your assignments to avoid incurring the penalty.
Programming assignments
There will be three programming assignments using Python:
- Using the robot with Pybullet simulator
- Neural Network Design and Supervised Learning
- Deep Q-learning for Robotic Grasping
Final project
For the second half of the course, students will work on a project that applies
some deep learning techniques to a robotic manipulation task. Students are free
to choose projects and will receive feedback to guide them toward a project that
can be reasonably completed within the timeframe.
Final project websites for this semester:
Course Announcements
The Piazza page for this course is here.
Academic Integrity
Be honest about citing other people's work: if you are inspired by an idea from a paper, then cite it; if you want to use a snippet of code you found online, add a comment that indicates where it came from.
